


Chapter
2-2
로봇의 정리작업 계획 추정
●
●
●
| 개발목표시기 | 2021. 12. | 기술성숙도 (TRL) | 개발 전 | 개발 후 |
|---|---|---|---|---|
| 3 | 6 | |||
| 결과물 형태 | SW-System | 검증방법 | 자체검증 | |
| Keywords | 심층학습, 강화학습, 정리작업, 물체 상호작용 인식, Deep Learning, Reinforcement Learning, Cleanup Task, Object Interaction Detection | |||
| 외부기술요소 | Open Source 및 자체 개발 기술 사용 | 권리성 | 특허, SW | |
* 본 내용은 송재복 교수(☎ 02-3290-3363, jbsong@korea.ac.kr)에게 문의하시기 바랍니다
** 본 내용은 필자의 주관적인 의견이며 IITP의 공식적인 입장이 아님을 밝힙니다.
***
정보통신기획평가원은 현재 개발 진행 및 완료 예정인 ICT R&D 성과 결과물을 과제 종료 이전에 공개하는 “ICT
R&D 사업화를 위한 기술예고”를 2014년부터 실시하고 있는
바, 본 칼럼에서는 이를 통해 공개한 결과물의 기술이
전, 사업화 등 기술 활용도 제고를 위해 매주 1~2건의 관련 기술을 소개함
II. 기술의 개념 및 내용
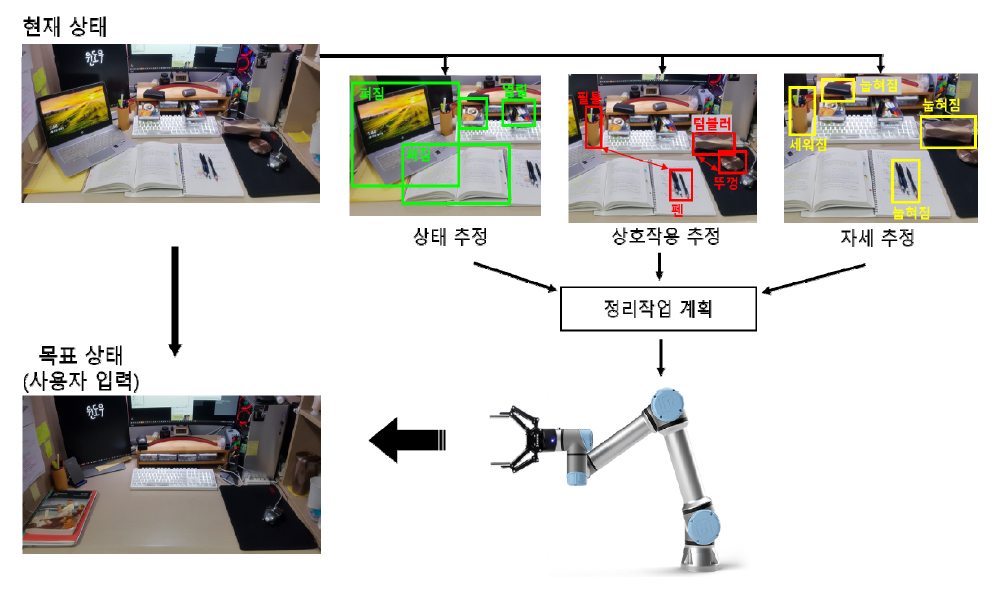
[그림 1] 기술개념도
- 상태 추정: 형태가 변할 수 있는 물체의 현재 및 목표 상태를 추정
예시) 책(펴짐, 덮힘), 서랍(열림, 닫힘)
- 상호작용 추정: 수납이나 조립 등 정리작업에 활용 가능한 물체 간 상호작용을 추정
예시) 필통·필기구(수납), 병뚜껑·병(조립)
- 추상적인 자세 추정: 지면에 대해 물체가 어떤 자세로 배치되어 있는지 추상적으로 판단
예시) 책(눕혀짐, 세워짐)
- 정리작업 계획: 어떤 물체를 우선적으로 정리할지를 계획
예시) 책 위에 펜이 놓인 경우, 책을 먼저 배치한 뒤에 책 위에 펜을 배치함
III. 국내외 기술 동향 및 경쟁력
- 바닥에 어질러진 물체를 파지 및 분류하거나 선반에 배치하는 작업을 수행함
- 물체 인식을 통해 미리 정해진 위치에 따라 정리작업을 수행함
- 물체 인식을 통해 책상 위의 물체를 파지하고 정해진 위치의 상자에 분류함
- 불확실성이 높지 않은 환경에서 작업을 수행함
| 경쟁기술 | 본 기술의 우수성/차별성 |
|---|---|
|
- Toyota사의 모바일 머니퓰레이터 HSR을
이용한 정리 기술 - 상하이 쟈오통 대학의 정리 기술 |
- 물체의 상태를 고려한 정리작업 계획 도출이 가능하므로,
노트북을 여닫는 등의 물체조작을 통한 정리작업을 수행함 - 주어진 상황에 따라 정리 순서를 도출하므로, 효율적인 정리작업 수행이 가능함 - 사용자가 제시한 사진을 기반으로 정리작업을 수행하므로, 별도의 시스템 수정 없이 다양한 정리작업 수행이 가능함 |
4. 표준화 동향
| 중점 표준화 항목 | 기술 수준 | 표준 수준 | 대응표준화기구 | 전략목표 | |
|---|---|---|---|---|---|
| 국내 | 국외 | ||||
| 사람과 로봇의 상호 작용을 위한 인식지능 평가 표준 | 90% | 100% | TTA PG413 |
JTC1 SC35,
ISO TC299 |
차세대 공략 |
| 로봇이동지능기반의 시맨틱 맵데이터 표현 표준 | 90% | 90% | TTA PG413 | IEEE RAS | 차세대 공략 |
| 인간과 로봇의 안전하고 효과적인 협동을 위한 조작 지능 | 80% | 90% | TTA PG413 |
JTC1 SC35,
ISO TC299 |
선도경쟁 공략 |
| 로봇 지능체계 및 평가방법 표준 | 80% | 90% | TTA PG413 |
IEEE RAS
ISO TC299 |
차세대 공략 |
|
사람이 로봇과 상호작용시 로봇을 신뢰할 수 있는
로봇 윤리 평가 표준 |
80% | 80% | TTA PG413 | IEEE-SA | 선도경쟁 공략 |
| 지능 생성/재구성을 위한 모듈간 상호운용성 표준 | 80% | 90% | TTA PG413 | ISO TC299 | 선도경쟁 공략 |
IV. 국내외 시장 동향 및 전망
| 활용 분야(제품/서비스) | 제품 및 활용 분야 세부내용 |
|---|---|
| 가정용 정리 로봇 | 가정에서 사용자의 취향에 따라 방을 정리하여 편의를 제공 |
V. 기대효과
* 본 자료는 공공누리 제2유형 이용조건에 따라 정보통신기획평가원의 자료를 활용하여 제작되었습니다.