


Chapter 2-1
센서결합 3D 정밀측위 기술
●
●
●
차지훈 | 한국전자통신연구원 실장
| 개발목표시기 | 2020. 12. |
기술성숙도 (TRL) |
개발 전 | 개발 후 | |
|---|---|---|---|---|---|
| TRL 3 | TRL 6 | ||||
| 결과물 형태 | SW-System | 검증방법 | 3자(외부 공인시험기관) 검증 | ||
| Keywords | 위성항법시스템, 측위, 시각편이 추정, 3차원 지도, 라이다, 도심 지역, GNSS, positioning, time-difference estimation, 3D map, LiDAR, urban area | ||||
| 외부기술요소 | 100% 개발기술 | 권리성 | 특허, SW, SW-IP | ||
II. 기술의 개념 및 내용
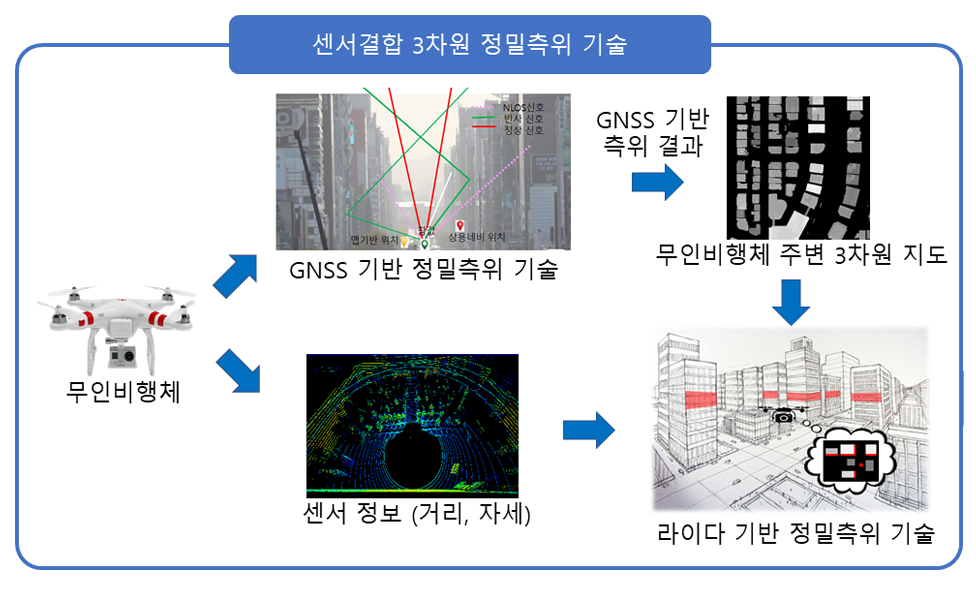
[그림 1] 기술개념도
1. 기술의 개념
- 다중경로 오차 완화를 위한 추정 알고리즘 개발
- 다중항법 위성군 도입과 활용의 극대화를 위해 각 항법 위성군들의 시각 편이를 동기 화시켜 하나의 위성 시각에 대해 추정
- 수직 방향의 위치 오차를 줄이기 위해 기상청 제공 실시간 데이터를 활용하여 기압고 도계 데이터의 해면 기압 값 입력
- 국토정보지리원의 3차원 가시화 모델로부터 3D 지도 생성
- 라이다로부터 획득한 거리 정보를 이용하여 GNSS 기반 방법보다 높은 정확도로 지도상에서의 위치를 추정
* 본 내용은 차지훈 책임연구원(☎ 042-860-6305, jihun@etri.re.kr)에게 문의하시기 바랍니다.
** 본 내용은 필자의 주관적인 의견이며 IITP의 공식적인 입장이 아님을 밝힙니다.
***
정보통신기획평가원은 현재 개발 진행 및 완료 예정인 ICT R&D 성과 결과물을 과제 종료 이전에 공개하는 “ICT R&D 사업화를 위한 기술예고”를 2014년부터 실시하고 있는 바, 본 칼럼에서는 이를 통해 공개한 결과물의 기술이 전, 사업화 등 기술 활용도 제고를 위해 매주 1~2건의 관련 기술을 소개함
III. 국내외 기술 동향 및 경쟁력
1. 기술의 특성
- 다중경로 오차를 매 신호 초기 시각에 추정하여 의사거리와 반송파 위상 데이터의 특성에 따라 이들을 조합하여 매 시각 다중경로 오차를 제거하는 기술
- 도심에서 신호가 부족하여 측위가 불가한 경우, IMU 데이터를 활용하여 측위 가용도 를 높이는 기술
- 해면 기압 값의 실시간 업데이트를 통해 기압고도계 데이터를 재계산하여 수직 오차 정확도를 향상시키는 기술
- 국토정보지리원의 3차원 가시화 모델로부터 가변 정밀도(축적 비율) 3D 지도 생성
- 라이다 거리 정보와 가장 유사한 거리 정보를 제공하는 위치를 지도에서 추정
- 2D/3D 라이다 및 2D/3D 지도를 이용한 기술
- GNSS 측위 결과는 후보 지역을 좁히는 데 이용
- 해당 없음
- 도심에서 GNSS 기반 센서 결합 측위 오차 5m 이내
- 도심에서 25cm 정밀도의 3D 지도 사용 시 라이다 기반 측위 오차 1m 이내
2. 경쟁기술/대체기술 동향 및 현황
- GPS와 IMU 센서 등을 결합한 SW 기술들은 기존에도 존재했으나 도심의 경우 다중 경로 오차에 대한 보정이 어려워 측위 기술에 적용하기에는 어려움이 많음
- GPS 기반 센서 결합에서 최근에는 Vision 기술을 적용한 항법을 시도하고 있음
- 도심에서는 지도 정보를 이용하여 대략적 위치를 예측한 후, searching 방법에 의해 항법 기반의 위치정보를 획득하는 연구 개발이 진행 중임
- 네트워크에 기반한 지도 정보와 GPS 보정 정보를 제공하는 항법 연구가 진행 중임
- Vision 기반의 항법을 적용하고자 하는 연구가 늘어나고 있음
3. 우수성 및 차별성
4. 표준화 및 특허
 표준화 동향
표준화 동향
- RTCA 혹은 RTCM에 의한 위성 항법 보정 정보의 표준화가 있으나 상업적인 이용이 아님
관련 보유특허
| 경쟁기술 | 본 기술의 우수성/차별성 |
|---|---|
|
-GPS와 IMU 센서 등을 결합한 SW 기술
-도심의 지도 정보를 이용하여 대략적 위치를 예측한 후, searching 방법에 의해 항법 기반의 위치정보를 획득
|
-다중 GNSS를 이용함에도 불구하고 시각 편이를 GPS 기
준으로 다중경로오차와 같이 추정하여 필요로 하는 위성의
수를 줄여 도심에서 GNSS 신호의 가용도를 높임
-도심에서 지도 정보 없이 오차 5m 이내의 GNSS 기반 측
위가 가능
-도심에서 라이다와 지도 정보를 이용하여 GNSS 기반 측
위보다 높은 정확도의 측위가 가능
|
4. 표준화 및 특허
- RTCA 혹은 RTCM에 의한 위성 항법 보정 정보의 표준화가 있으나 상업적인 이용이 아님
| No | 국가 | 출원ㆍ등록번호(출원ㆍ등록일) | 상태 | 명칭 |
|---|---|---|---|---|
| 1 | 미국 | 16/708143(2019-12-09) | 출원 완료 | GNSS multi-path mitigation system and method based on clock-offset estimation between different GNSSs and know position information |
| 2 | 한국 | 2019-0024884(2019-03-04) | 출원 완료 | GNSS데이터의 다중경로오차 완화를 위한 무인기 위치결정 방법 및 장치 |
| 3 | 한국 | 2019-0022073(2019-02-25) | 출원 완료 | 위성항법 다중경로오차 감쇄 방법 및 장치 |
| 4 | 한국 | 2020-0058832(2020-05-18) | 출원 완료 | 위성항법 측위 시스템 |
| 5 | 한국 | 2019-0165276(2019-12-12) | 출원 완료 | 3차원 지도 정보를 이용한 측위 방법 및 장치 |
IV. 국내외 시장 동향 및 전망
1. 국내외 시장 동향 및 전망
2. 제품화 및 활용 분야
| 활용 분야(제품/서비스) | 제품 및 활용 분야 세부내용 | |
|---|---|---|
| 1 | GNSS 기반 측위 SW | - 도심에서 정밀 측위가 가능하여 자율주행 및 보행자 등의 모든 위치 정보 제공에 사용 가능 |
| 2 | GNSS 기반 센서결합 칩 개발 |
- 도심에서 GNSS를 필요로 하고 사용하는 제품에 활용 가능 - 가용도, 신뢰도가 높은 정밀 측위 수행 가능 |
| 3 | 라이다 기반 측위 SW |
- 도심 환경에서 안전하게 비행할 수 있는 무인기 - 모든 환경에서 높은 정확도를 보장하는 GNSS-라이다 결합 모듈 |
V. 기대효과
1. 기술도입으로 인한 경제적 효과
2. 기술사업화로 인한 파급효과
* 본 자료는 공공누리 제2유형 이용조건에 따라 정보통신기획평가원의 자료를 활용하여 제작되었습니다.